5. Construction des pattes
Description
Afin de pouvoir marcher avec la démarche indiquée ici, les pattes du robot vont devoir pouvoir être rétractables. Pour se faire, nous utiliserons une coulisse avec un ressort.
v1

Le principe de ce modèle est d’utiliser une grande vis comme guidage et liaison pour la coulisse, le ressort et le cadre. Toutefois, notre vis était trop grande pour le trou.
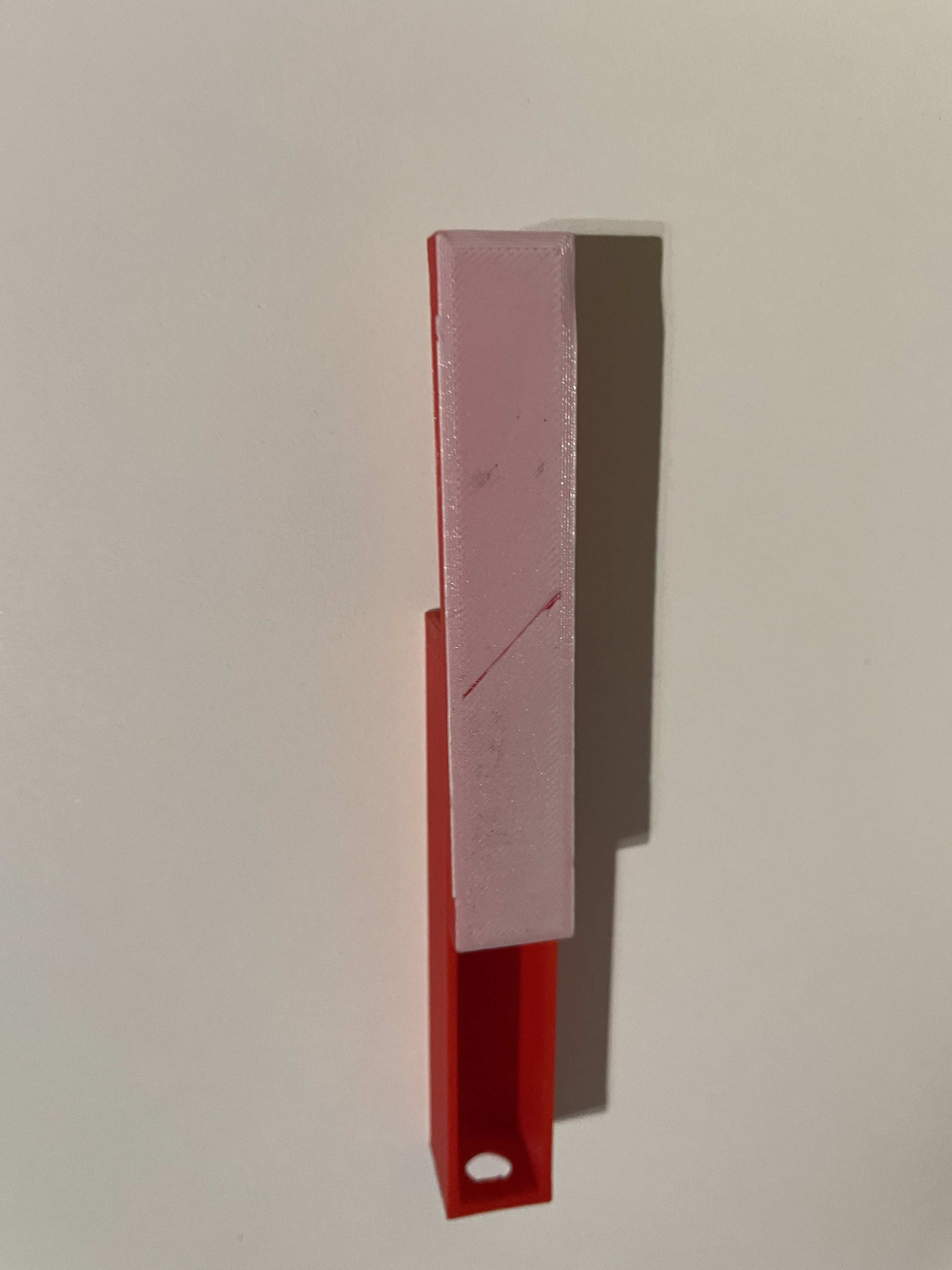
v2

Les problèmes de la v1 ont été réglés. Toutefois, de nouveaux sont survenus:
- La friction entre les pièces est trop grande
- Le point de jonction entre la coulisse et le cadre est trop fragile
- Il n’y a pas de possiblités facile d’attache aux ventouses
v3


Plusieurs améliorations ont été apportées:
- Une 2e coulisse imbriquée a été ajoutée pour plus de stabilité
- Les coulisses sont été alongées
- Nous avons dû utiliser de plus petites visses afin de pouvoir les insérer dans les ressorts
Toutefois, il reste encore plusieurs problèmes:
- Les nouvelles visses sont trop longues. Il faudra donc alonger le cadre
- L’épaisseur du PLA autour du trou de visse est trop mince, donc il se casse avec un peu de force
Pièces jointes
Photographie d'un ressort coupé et d'un long ressort{kind=link}
Photographie d'une grande vis
{kind=link}
Photographie de la version 1 des pattes
{kind=link}
Photographie de la version 2 des pattes
{kind=link}
Photographie de la version 3 des pattes
{kind=link}